一、引言
软体机器人因其高度的柔韧性和适应性,在医疗、救援、工业等领域展现出巨大潜力。与传统刚性机器人相比,软体机器人能够更好地适应复杂环境和执行精细任务。高压放大器在软体机器人的研究和开发中扮演着关键角色,为软体机器人的驱动和控制提供了强大的支持。
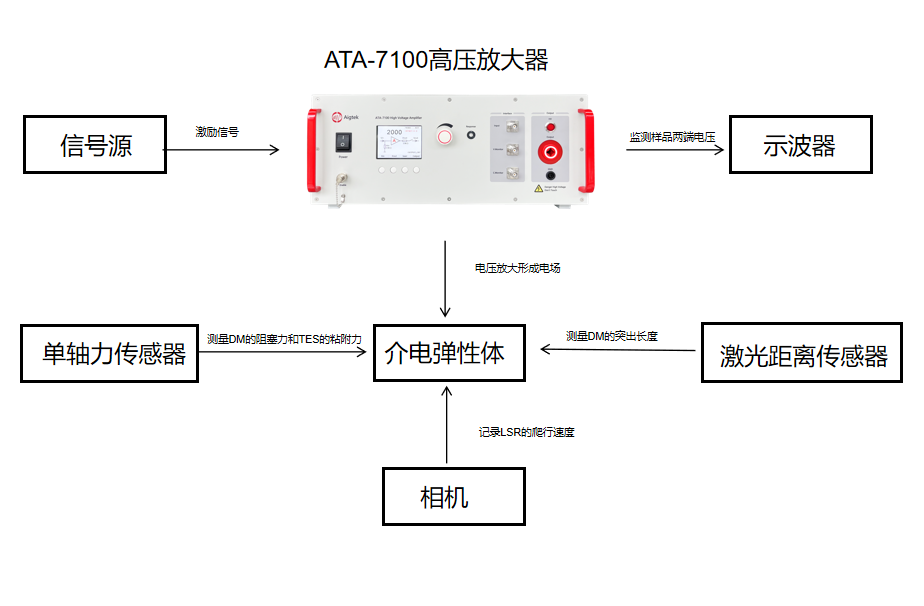
图:高压放大器在介电弹性体制成的软机器人研究中的应用
二、高压放大器在软体机器人中的作用
(一)驱动柔性致动器
软体机器人的核心组件之一是柔性致动器,这些致动器通常由介电弹性体(DE)等材料制成。介电弹性体在施加电压后能够产生显著的机械变形,从而实现机器人的运动。高压放大器能够将低电压信号放大到数千伏的高电压,为介电弹性体提供足够的电场强度,使其产生所需的变形。
(二)精确控制与信号放大
在软体机器人的控制系统中,传感器捕获的信号通常非常微弱,需要通过高压放大器进行放大,以便后续的信号处理和机器人响应。此外,高压放大器还可以用于软体机器人传感器和执行器之间的通信,实现快速信号处理,提高机器人的响应速度和精度。
(三)支持复杂运动与高负载能力
高压放大器能够为软体机器人提供足够的能量,使其能够执行复杂的运动和高负载任务。例如,在受尺蠖启发的蠕动机器人研究中,通过高压放大器驱动的软体机器人能够携带超过100g的负载,最大运输速度可达8.54mm/s。
图:ATA-7100高压放大器指标参数
三、应用实例
(一)受水蛭启发的软机器人
在一项受水蛭启发的软机器人研究中,研究人员利用高压放大器(ATA-7100)驱动介电弹性体肌肉,实现了软机器人的两栖运动、攀爬和负重爬行。实验结果表明,高压放大器能够有效地驱动软体机器人,使其在不同环境中表现出良好的适应性和稳定性。
(二)介电弹性体致动器
介电弹性体致动器(DEAs)是软体机器人中常用的驱动元件。研究人员开发了一种超高压放大器(UHV-Amp),能够将12V直流电压升压至4kV,并通过计算机实现对放大器输出的控制。这种放大器在驱动单层碳纤维粉末基DEAs方面表现出色,为软体机器人的教育和研究提供了有力支持。
(三)摩擦电软机器人
在摩擦电软机器人研究中,高压放大器(ATA-7100)与摩擦纳米发电机(TENG)结合,为软体机器人提供动力。实验表明,这种组合能够有效地驱动软体机器人,使其在复杂环境中实现稳定的运动。
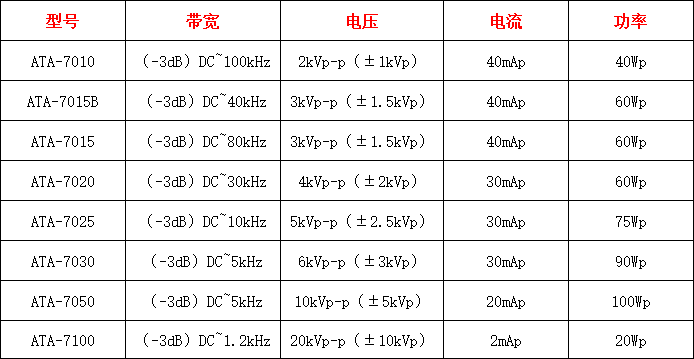
图:ATA-7000系列高压放大器指标参数
高压放大器在软体机器人研究中发挥着不可或缺的作用。它不仅能够驱动柔性致动器,实现软体机器人的精确运动控制,还能支持复杂运动和高负载任务。随着技术的不断进步,高压放大器将不断提高其工作效率和响应速度,为软体机器人技术的发展提供更强大的支持。
审核编辑 黄宇