前言
书接上文,这周我们就开始深入解读下PD与OD模块。PD即周期性数据,每次主从站间通信都会交互的数据类型,它分为PDin与PDout。OD的全称是On-Request Data,即在请求时才会应的报文。OD模块通常分为三个部分,ISDU、Command和Event。
01
主站消息状态机回顾
上回我们讲到消息处理模块最重要的M-Sequence Type以及主从站的消息状态机,主站的消息状态机会稍微复杂一点,我们在开发主站协议栈的时候,也碰到一些无法理解的规则。
在规范中DL_WRITE和DL_READ都是通过Page通道读写通信参数的,应该都是在Startup阶段才能进行,是不允许在PREOP和OP阶段进行的。但是小编在1.1.3版本时就发现一个问题,从PREOP切换到OP时,需要DL_WRITE发送切换模式的命令,同时发送一个masterCycletime的写入指令,这个指令也是DL_Write的命令。
这就造成了一个困惑,虽然在状态机中DL_Write_DeviceMode这个命令属于单独的命令,在PREOP阶段也适用,但是DL_Write(0x01, "MasterCycleTime")可是确确实实的DL_Write,理论上不应该出现在PREOP阶段的它,却出现了,直到目前最新的1.1.4版本尚未给任何说明。
具体如下图,DL_Write(0x01, "MasterCycleTime")这条命令是在从PREOP切换到OP前发出的,也就是其还在PREOP阶段。
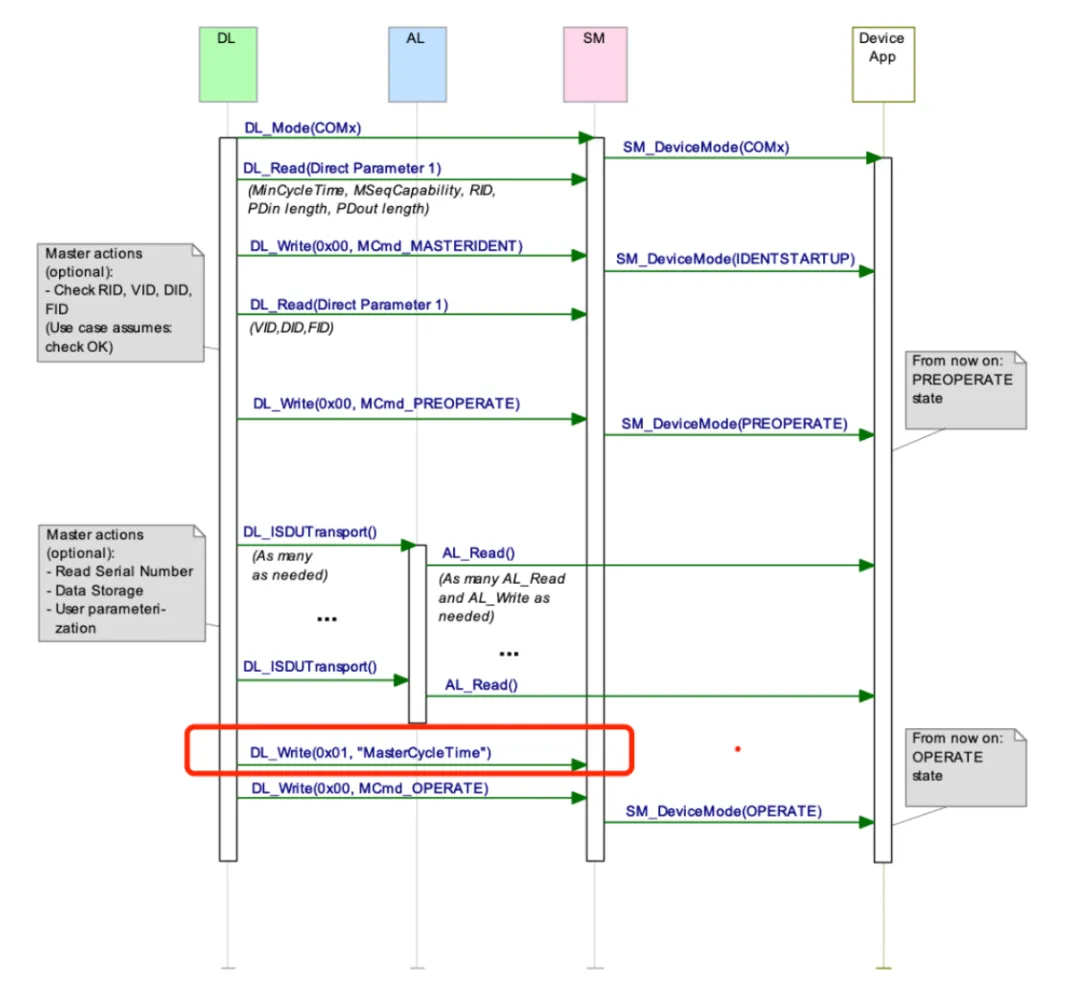
好了,我们希望下个版本能够解决这个问题,同时各位小伙伴也可以测试一下自家的主站是否会发出DL_Write(0x01, "MasterCycleTime")这个命令。
这条命令仅仅在这个图中出现了一次,在其他地方再无提及,猜测这个命令未必是必须的,因为主站通知从站我的mastercycletime也没有多大作用,毕竟从站都是被动式应答,只有主站询问了,从站才会回答。
02
关于ProcessData
下面来讲讲PD处理模块,在1.0时代,IO-Link规范规定了PD交互的多种方式,要求每次交互就2字节,PD和OD交错运行,PD多余2个字节,就得拆包,多次发送,这个效率可想而知,非常低下,因此1.1版本做了重大改革,废除了这种低下的方式。
1.1版本后,每次最大32字节PD数据,中间还可以夹带OD数据,大大提升发送效率;当然对于像RFID这种上百个字节的,还是需要拆分字节,多次发送,再组包。

03
主从站的PD状态机
3.1 主站PD状态机
为了兼容1.0版本,状态机里还把遗留的PDInInterleave放到了里面,从1.1版本来看,PD就两个状态,Inactive状态(即Startup和PREOP所处的装状态)和PDSingle状态(即OP所处的状态)。
3.2从站PD状态机
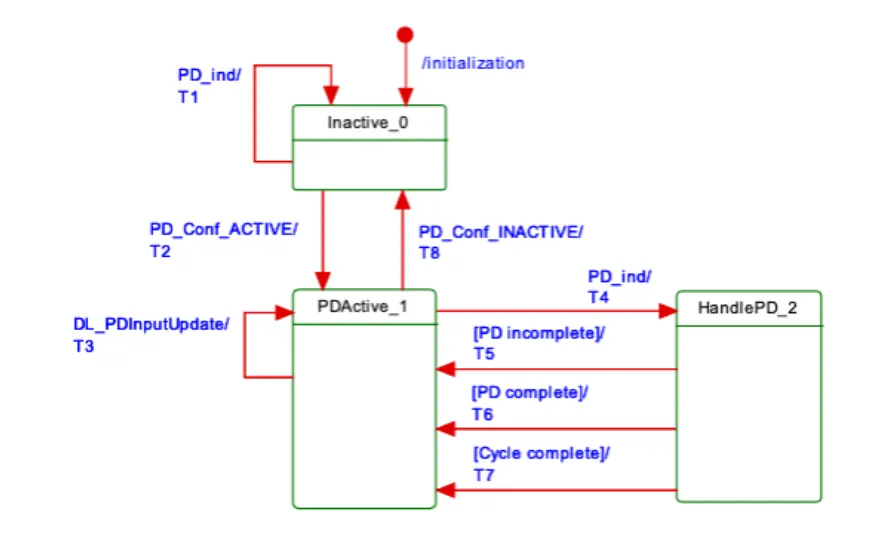
从站的PD状态机也比较简单,从inactive状态被激活后,进入active状态,Handle PD主要是1.0版本的遗留,在多个字节数据挨个处理的时候来回在PD Active和Handle PD之间交互,而1.1版本,直接进行DL_PDInputUpdate就行了。
3.3总结
综上所述,PD就是简单的收发数据,没有太多的处理,应该算IO-Link协议栈内部最简单的模块了。
那么拿到睿远的IO-Link协议栈怎么处理PD数据呢,虽然简单,但PD也是IO- Link最重要的数据,对于老版本的睿远协议栈,可以直接操作PDE_PDIn和PDE_PDOut这个指针就行了。
按照大端排序的原则,PDE_PDIn[0]就是上传主站PD数据的最左边的那个字节,因为PDE_PDIn的内存是动态创建的,故要避免指针越界的问题。
在新版本中我们封装了一个函数:
UIntegerT8 CeresStackSetPDInData(UIntegerT8 *pdin_data, UIntegerT8 pdin_len)
通过该函数,可以尽量避免指针越界的问题。
对于SSP的版本,进一步封装了直接给测量值赋值的函数,这个就后续在SmartSensorProfile这个章节再讲了。
04
主站的OD数据处理
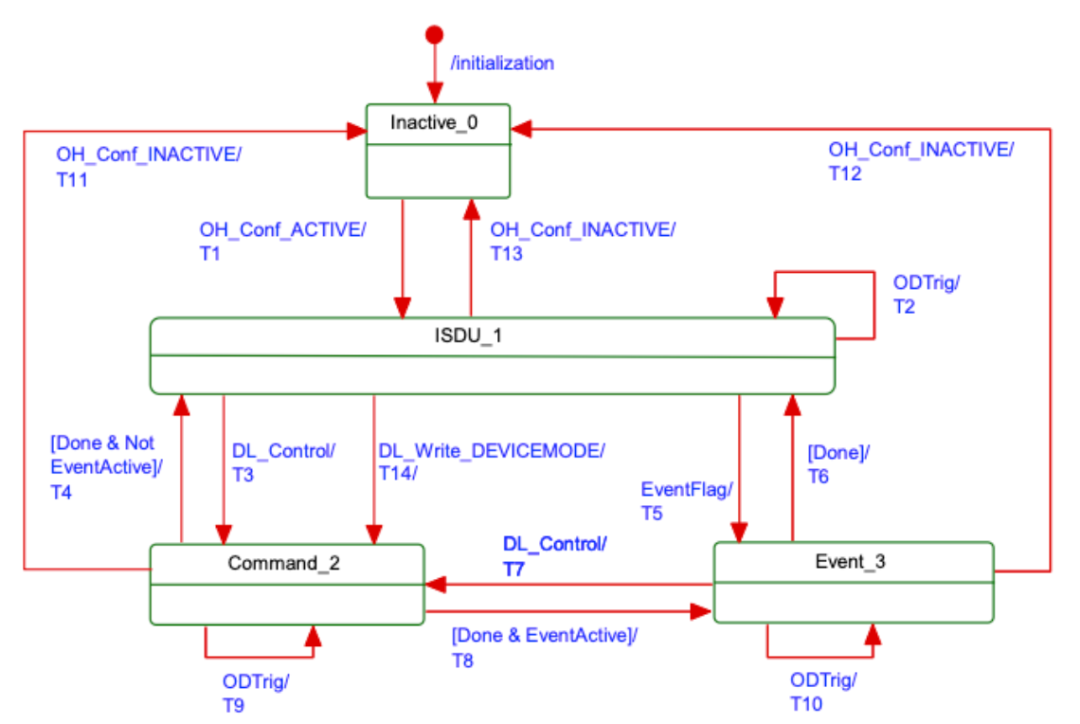
上图是主站的状态机,主站的On-request处理程序是DL-Mode处理模块中“Startup_2”“PreOperate_3”和“Operate_4”状态下的一个从属状态机。它控制其他三个状态机,即ISDU处理模块、command处理模块和Event处理模块的状态机,默认情况下,它始终在ISDU状态。
1
当收到EventFlag时,状态机将切换到Event处理模块,在完整读取Event信息后,它将返回到ISDU处理状态;
2
当收到DL_Control,则状态机将切换到Command处理模块;完成相关命令后,状态机将返回到之前的状态(ISDU或Event状态)
3
当收到DL_Write_DeviceMode命令,也会切换到Command模块,用于处理DL Mode的状态切换,这是1.1.4版本增加的内容
05
从站的OD数据处理
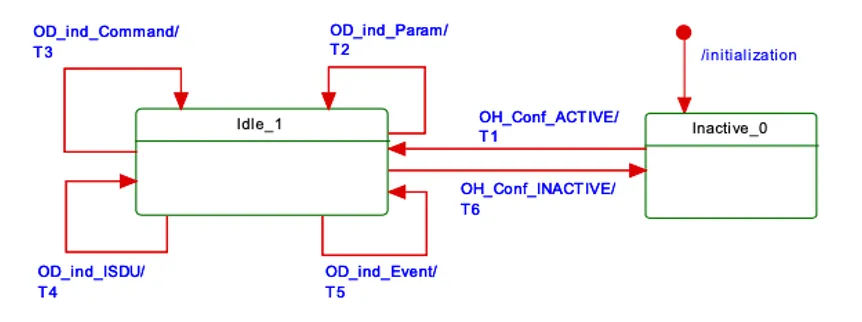
从站对OD的请求重定向4个独立的小模块:
Param读写模块
该模块主要读写DPP部分的数据,专门走了Page通道
Command模块
用于切换从站的状态,保持和主站的同步
ISDU模块
读写ISDU
Event模块
读写Event
06
DPP&ISDU的处理
DPP即Direct Parameter Page,其实属于ISDU部分,DPP1对应ISDU的Index 0x00,DPP2对应ISDU Index 0x01。
规范中明确如果不支持ISDU,就直接采用DPP1和DPP2进行参数的读写,这是为了方便一些简化版本的协议栈进行简单的IO-Link控制。
那么我们看DPP和ISDU在规范中的定义:
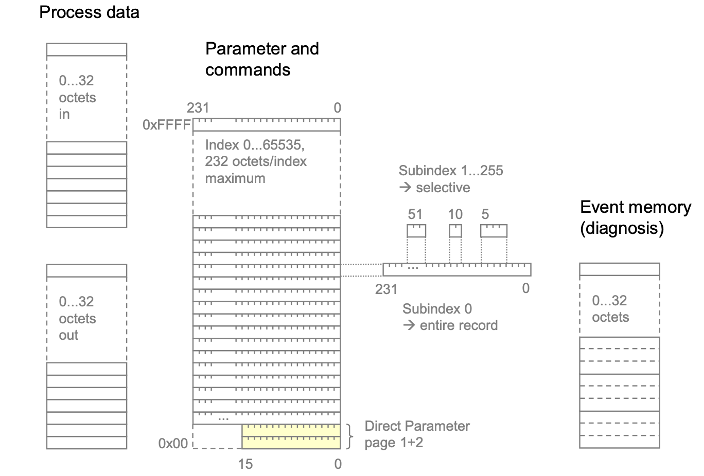
DPP1和DPP2就是从属于ISDU的,只是协议栈规定了DPP走的PAGE通道,其余ISDU走ISDU通道,个人认为,其把简单的东西复杂化了,如果合二为一岂不是更好。
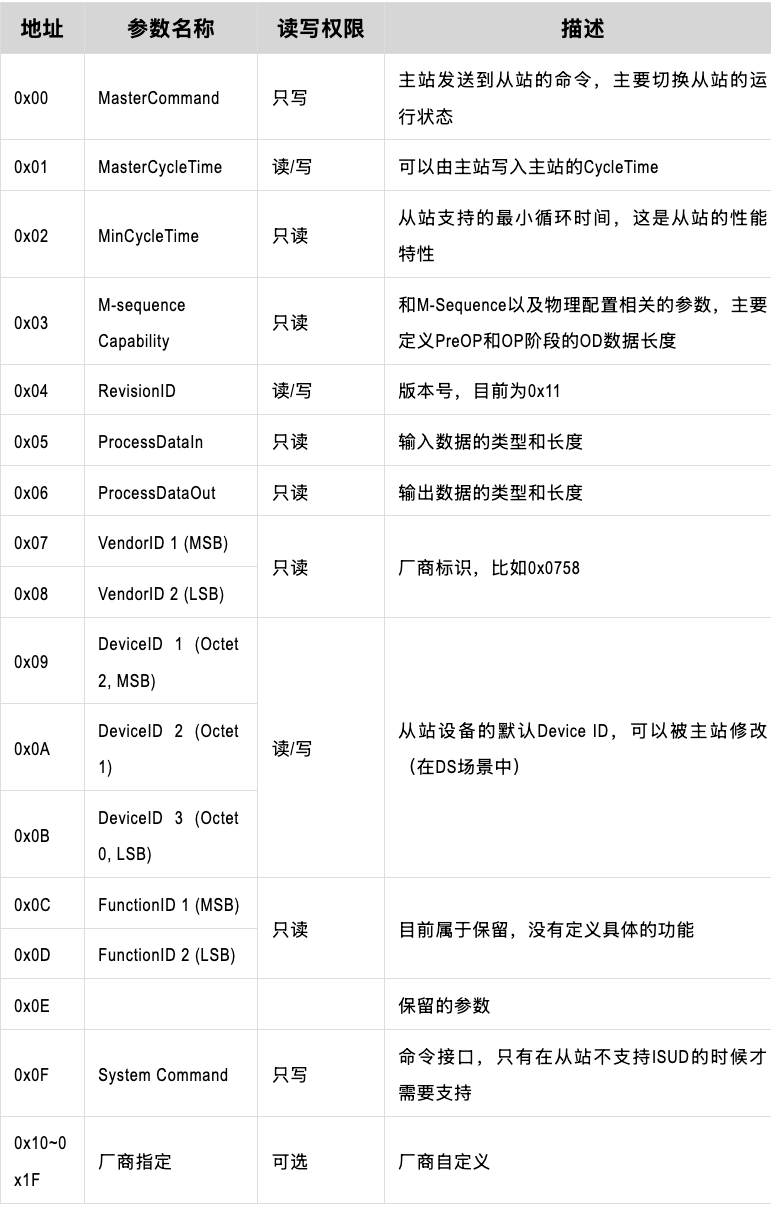
其中0x00:MasterCommand主要用于接收主站的各类命令,进入Command模块进行处理:

07
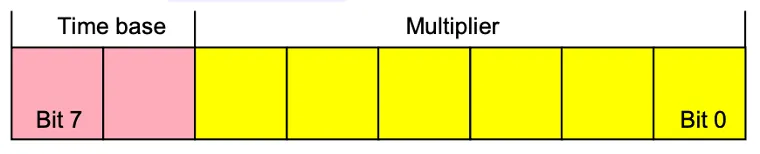
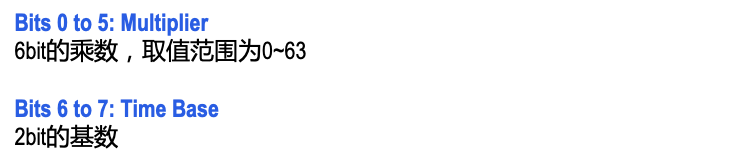
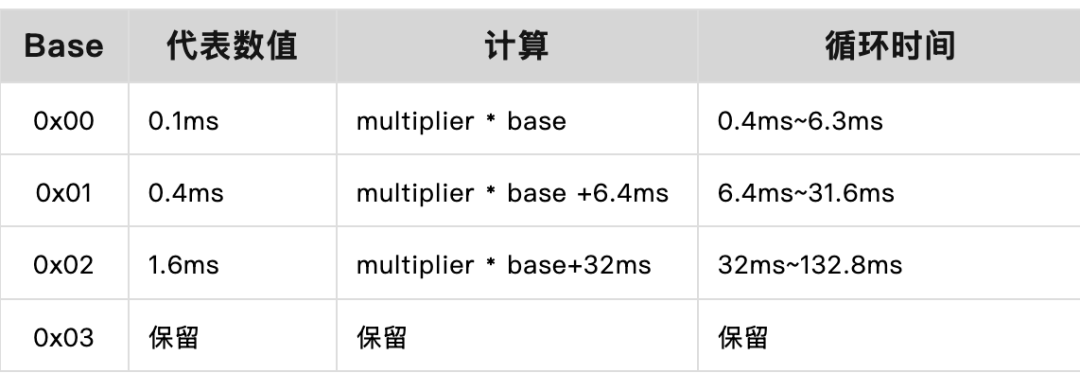
MasterCycleTime&MinCycleTime
MinCycleTime是从站主动上传汇报给主站的循环时间,而MasterCycleTime则是主站最终根据字节大小,从站汇报的循环时间决策出的实际时间,都是采用Timebase|Multiplier的方式,具体如下:
08
M-sequence Capability编码格式
这个编码在前面的章节中已经详细介绍,这里就不多说了,直接看一个例子:
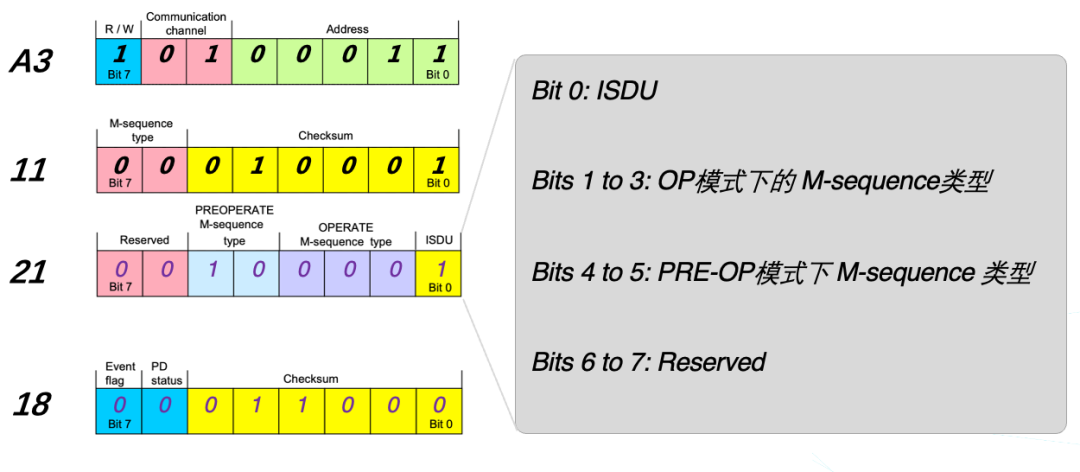
这是从站回复的一个示例,这回复的0x21这个数据中,表明了自己分别在Preop和OP模式下的OD字节大小
09
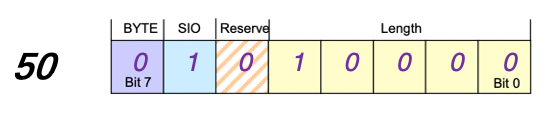
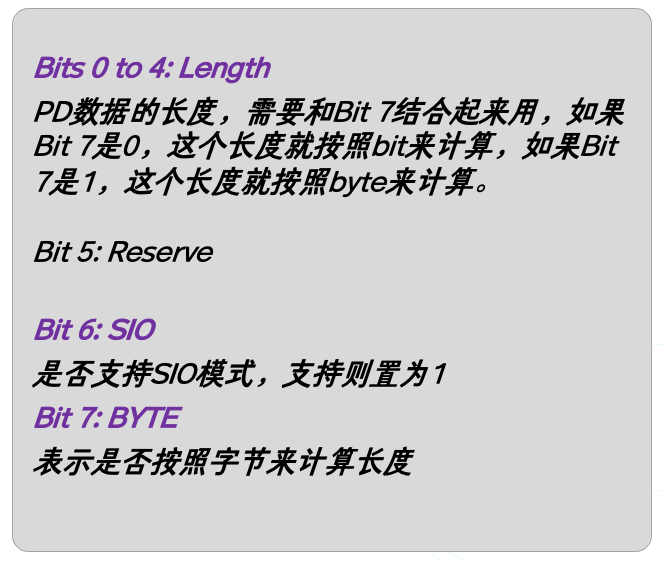
ProcessDataIn& ProcessDataOut
PDIn和PDOut的字段,都是采用是否Byte位和Length来组成,把一个字节的作用抠到了极致。
结语
本期的内容就先到这里,以上就是本期PD处理模块、OD处理模块与DPP主要字节的解析,DPP作为IO-Link的关键参数,包含了IO-Link设备的关键信息。下一期,我们就开始介绍与参数配置相关的ISDU部分,这也是IO-Link技术的核心价值体现。