神经元设备的发展经历了从基础信号检测到多功能智能集成的演进过程。自1920年代脑电图(EEG)信号首次被发现以来,神经电极技术逐步发展,如1957年出现的钨微丝电极。1970年代,膜片钳技术的出现使细胞内记录成为可能,成为研究离子通道的“金标准”。随着人工智能的兴起,尤其是1950年代图灵测试的提出,计算机学习与神经网络算法逐渐成熟。1970年代脑机接口(BCI)技术的提出,标志着神经科学与AI的交叉融合。进入21世纪,随着纳米技术、柔性电子和光学成像的发展,出现了如Neuropixels探针、人工感觉神经元设备和闭环神经调控系统等先进设备,推动了神经元设备在灵敏度、生物相容性和功能集成方面的显著进步(图1)。
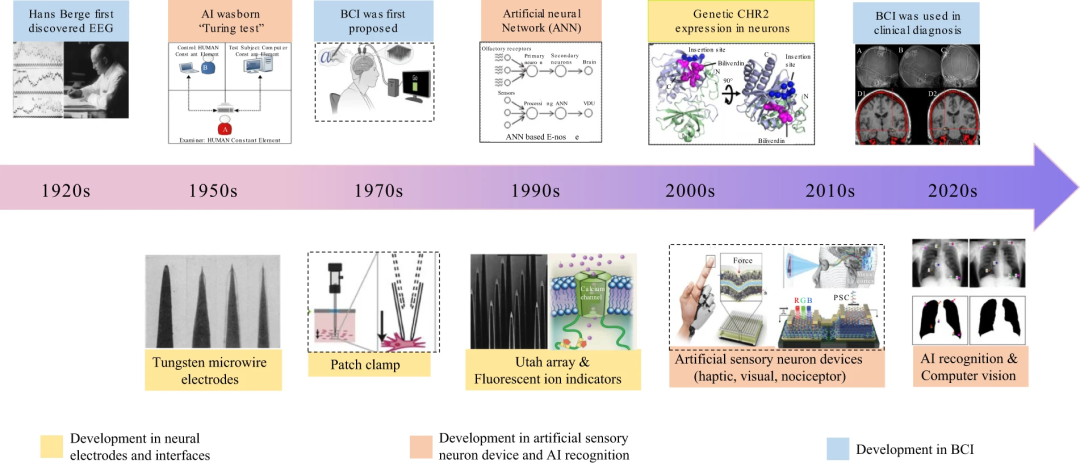
图1:神经元设备的发展历程
1920年代:起点是脑电图(EEG)信号的发现,这标志着人类首次能够无创地记录大脑的电活动1950年代:出现了钨微丝电极,实现了对单个神经元电活动的记录;同时图灵测试的提出,为后来人工智能与神经科学的融合埋下伏笔。1970年代:膜片钳技术的出现,使得对单个离子通道的高精度研究成为可能,是细胞内记录的“金标准”;脑机接口(BCI) 的概念在这一时期被正式提出。1990年代 - 2000年代:技术进入集成化阶段,出现了犹他阵列等微电极阵列(MEA),实现了对神经元群体的同步记录;同时,荧光离子指示剂(如CHR2)的发展,为光学成像打开了大门。2010年代 - 2020年代:领域进入爆发期。人工感觉神经元设备(触觉、视觉、痛觉)被开发出来,用于模拟和替代生物感官;AI识别技术(如人工神经网络ANN)与BCI技术深度融合,推动了临床诊断和智能假肢等应用的发展。该图展示了该领域从单一信号检测到多功能集成,从宏观记录到微观调控,从基础研究到临床与人工智能应用的演进路径。
HUIYING
神经元接口设备的分类概述
细胞内记录设备
膜片钳技术:通过玻璃微管穿透细胞膜记录离子通道活动,具有高时间分辨率,但操作复杂且难以并行记录。
自动化与纳米化发展:如垂直纳米线电极阵列(VNEA)和高密度神经电子接口(CNEI)实现了对多个神经元的并行记录,模拟膜片钳的电流/电压钳模式,具备良好的生物相容性(图2)。
图2:用于细胞内记录的神经元接口设备
图2展示了细胞内记录技术的演进,从传统方法到现代纳米技术。
图2 a-c.膜片钳技术:
a. 展示了传统的玻璃微管穿刺细胞进行记录的原理。
b. 展示了利用该技术记录的轴突体动作电位(APs)和兴奋性突触后电位(EPSPs)。
c. 展示了自动化膜片钳机器人,实现了高通量、自动化的细胞内记录,降低了技术门槛。
图2 d-f.纳米线电极阵列(VNEA):
展示了这种纳米级器件可以垂直穿透细胞膜,实现对培养的神经元进行细胞内记录和刺激,具有良好的生物相容性。
图2 g-i.高密度神经电子接口(CNEI):
这是一种革命性的技术,它通过数千个高密度电极,模拟膜片钳的功能,实现了大规模、并行的细胞内记录。
它可以在伪电流钳(pCC)和伪电压钳(pVC)模式之间切换,分别记录膜电位和离子通道电流。
i. 表明通过特定的电刺激,可以将细胞外记录信号转换为细胞内测量。
细胞内记录技术正从黄金标准但低通量的膜片钳,向自动化、高通量的机器人技术,并最终向可扩展、大规模并行的纳米电子接口方向发展。
细胞外记录设备
传统电极阵列:如犹他阵列,采样范围广但易造成组织损伤。
柔性与高密度探针:如NeuroGrid和Neuropixels探针,可实现大规模神经元活动记录,具备高空间分辨率和良好的信号质量。
多功能集成探针:结合电刺激、药物释放和光学调控,如带有微流控通道的探针,可同时记录电活动并释放神经递质(图3)。
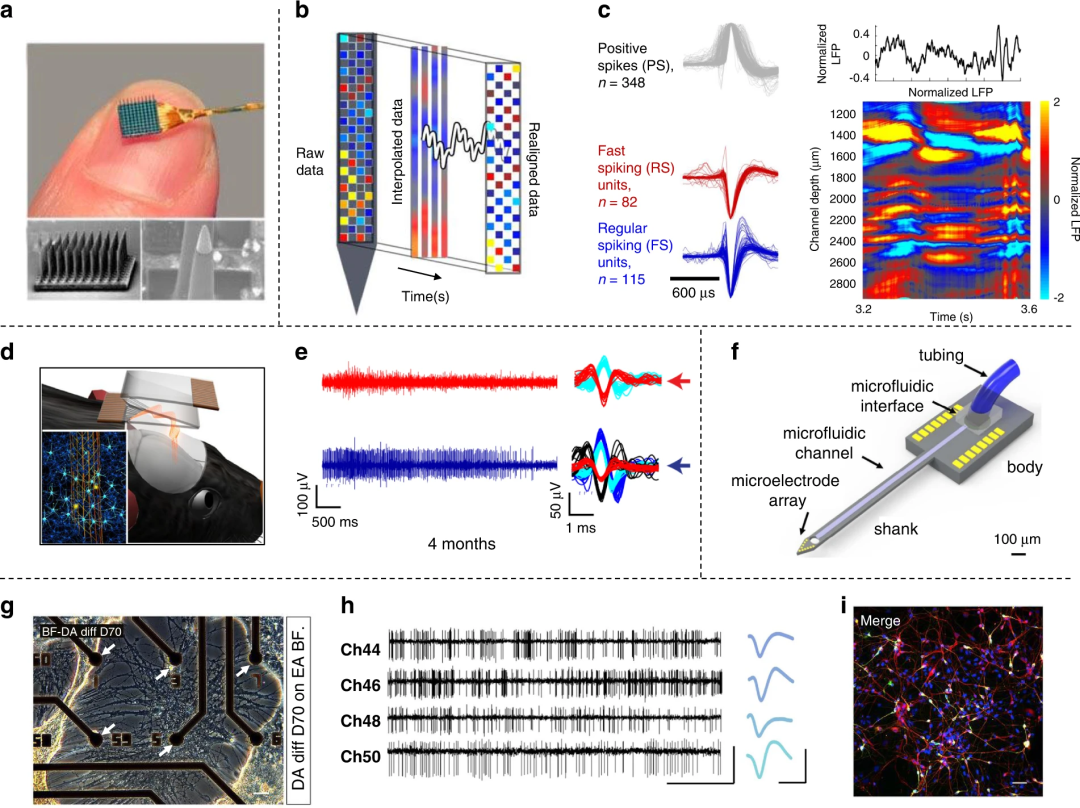
图3:用于细胞外记录的神经元接口设备
图3聚焦于记录神经元群体电活动的细胞外记录技术。
图3a.犹他阵列:一种经典的刚性微电极阵列,采样范围广,但因其刚性易导致组织损伤和炎症。
图3 b-c.Neuropixels探针:新一代的高密度硅基探针,包含上千个记录点,能够在脑中实现大规模、单神经元分辨率的记录。图3 c显示了在人类皮层中记录到的不同神经元动作电位和局部场电位(LFP)。
图3 d-e.网状电子器件:这是一种柔性、与脑组织模量匹配的电子器件,能够与脑组织无缝融合,显著减少免疫反应,实现了长达数月的稳定记录(图e显示了对侧脑区的同步记录)。
图3 f.多功能神经探针:集成了微流控通道的探针,可以在记录电活动的同时,向特定脑区输送神经活性物质(如药物),实现了“记录-干预”一体化。
图3 g-i.多功能微电极阵列(MEA):
g. 和 i. 显示在MEA上培养的多巴胺能神经元高度成熟且表达特异性标记物,证明了器件良好的生物相容性。
h. 展示了从四个通道记录到的自发电活动,用于研究神经网络的放电模式。
细胞外记录技术的发展趋势是更高密度、更大规模、更柔性和更多功能集成,以实现长期、稳定、多维度的神经信息获取。
光学成像记录设备
离子传感器:如K⁺、Ca²⁺荧光探针,用于实时监测离子动态。
基因编码探针:如GCaMPs,提高了荧光信号的亮度和准确性。
纳米材料传感器:如金纳米团簇、上转换纳米颗粒,增强了成像分辨率和生物相容性,适用于自由运动动物的神经活动监测(图4)。
图4:用于光学成像记录的神经元接口设备
图4展示了利用光学和化学传感器进行神经活动成像的技术。
图4 a-b.钾离子(K⁺)纳米传感器:
a. 展示了将K⁺指示剂封装在介孔二氧化硅纳米颗粒中,制成对K⁺高度敏感的纳米传感器。
b. 在癫痫小鼠模型中,K⁺纳米传感器的荧光信号与癫痫发作时的电信号高度相关,实现了在自由活动动物体内无创监测神经电活动。
图4 c-d.钙离子(Ca²⁺)指示剂:
c. 展示了基因编码的钙指示剂(如GCaMP)的结构原理。
d. 是GCaMP的分子结构图,这类指示剂被广泛应用于活体研究中,通过钙信号间接反映神经元的活动。
图4 e.纳米颗粒生物传感器: 如量子点(QD),具有荧光强、稳定性好等优点,可作为先进的生物传感器。
图4 f.金纳米团簇:原子级精确的金纳米团簇可用于近红外二区(NIR-II) 脑部高分辨率成像,图中显示了其结构和小鼠脑部血管的清晰成像。
光学成像技术通过基因编码指示剂和先进纳米材料,提供了高空间分辨率、无创或微创的神经活动监测手段,是对电生理记录的重要补充。
HUIYING
神经元设备的应用领域
神经调控
脑机接口(BCI):通过植入微电极阵列实现双向通信,控制机器人假体并反馈触觉信号。
闭环深部脑刺激(DBS):用于治疗帕金森病、抑郁症等,通过实时检测生物标志物进行精准刺激(图5)。
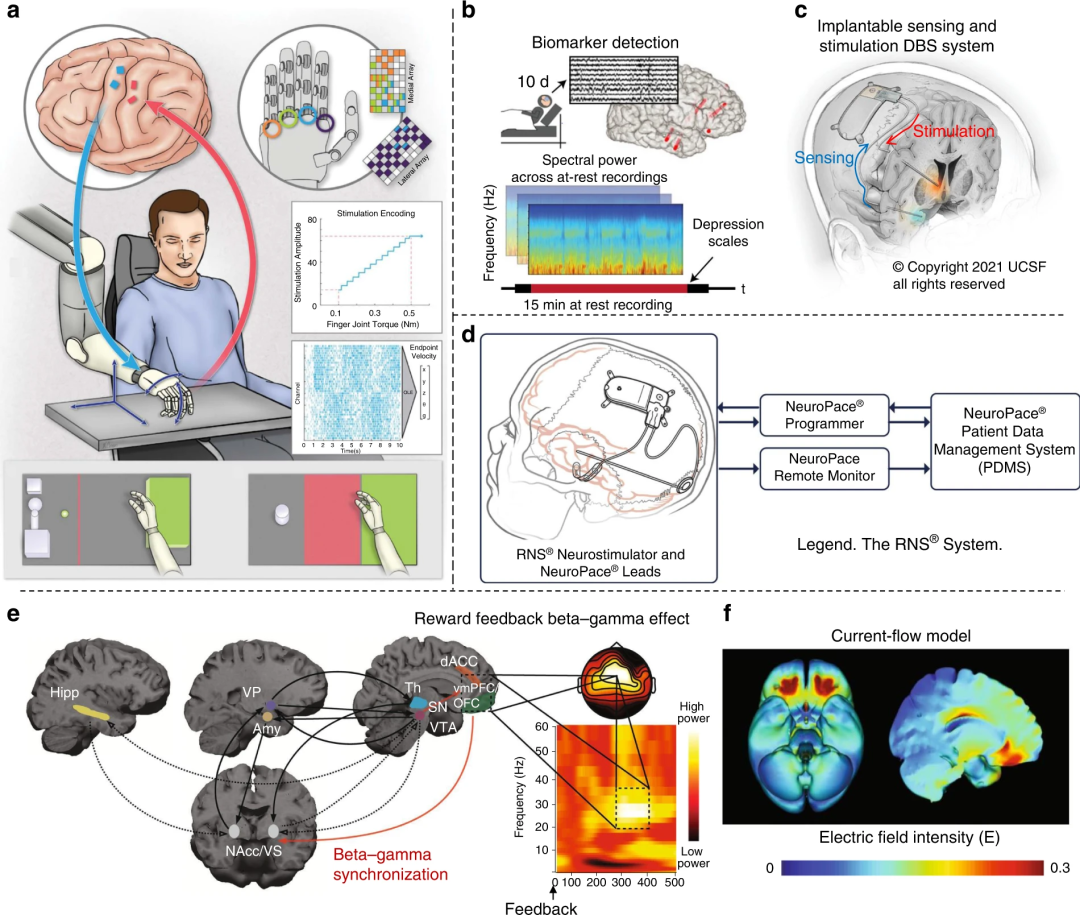
图5:应用于神经调控的神经电活动记录
图5展示了神经元设备在治疗神经系统疾病方面的临床应用。
图5 a.双向脑机接口(BCI)系统:该系统通过植入的微电极阵列记录运动意图以控制机械臂,同时刺激感觉皮层以产生触觉反馈,形成一个完整的“感知-控制-反馈”闭环。
图5 b-d.闭环深部脑刺激(DBS)系统:
b. 和 c. 展示了一种完全植入式的DBS系统(如NeuroPace RNS System),可以持续记录神经活动(如10天),检测特定的疾病生物标志物(如癫痫发作前兆)。
d. 展示了该系统在检测到异常信号时,能自动发出电刺激进行干预,从而有效减少癫痫发作。
图5 e-f.非侵入性神经调控:
展示了使用经颅交流电刺激(tACS) 治疗强迫症(OCD)。
e. 模型整合了β-γ脑电节律与奖赏学习回路。
f. 是三维重建的皮层表面电流流动模型,用于精准定位刺激靶区。
闭环调控是神经调控的未来,它通过实时监测、解码并干预异常的神经活动,实现了个性化、自适应的疾病治疗。
人工感觉神经元设备
模拟生物感官系统(如触觉、视觉),将外部刺激转化为电信号。
例如VO₂基触觉传感器、视觉-触觉融合系统(BASE),可用于假肢控制和机器人操作(图6)。
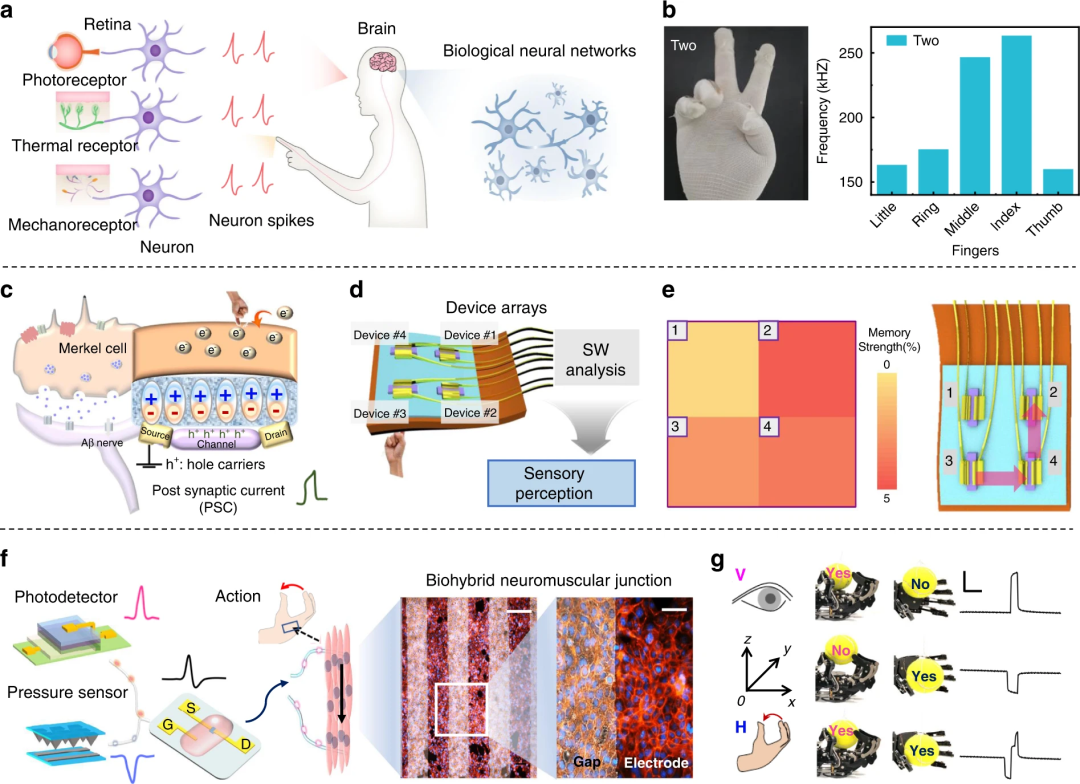
图6:用于模拟人类感觉系统的人工神经元感觉设备
图6展示了模仿生物感官的人工感觉神经元设备。
图6 a.生物感知系统示意图:展示了皮肤中的机械感受器、视网膜中的光感受器等将外部刺激转化为电脉冲(峰电位)的基本原理。
图6 b.人工尖峰曲率感觉神经元:使用VO₂材料制成的器件,可以对手指弯曲姿势(如手势“二”)做出响应,并以放电频率编码信息。
图6 c-e.人工本体-突触触觉感觉器官(AiS-TSO):
c. 模拟了触觉中的Merkel细胞在压力下引起Ca²⁺内流的机制。
d-e. 该器件阵列不仅能感知触摸,还能通过像素值的大小“记忆”触摸的顺序,实现了感知与记忆的一体化。
图6 f-g.双模态人工感觉神经元(BASE):
这是一个里程碑式的工作,将视觉(光电探测器)和触觉(压力传感器) 信息在一个器件上融合。
融合后的信号可以控制肌肉细胞或机器人手臂,使机器人能更准确地抓取目标物体(仅靠触觉或视觉单一模式容易失败)。
人工感觉神经元通过模拟生物感官的换能机制和编码方式,并实现多模态信息融合,为下一代智能假肢和机器人提供了关键的感知能力。
人工智能记忆与识别
模拟人脑学习与记忆机制,如视网膜启发的运动识别硬件、光脉冲神经突触网络。
实现模式识别、运动检测和自主学习,处理速度远超生物神经网络(图7)。
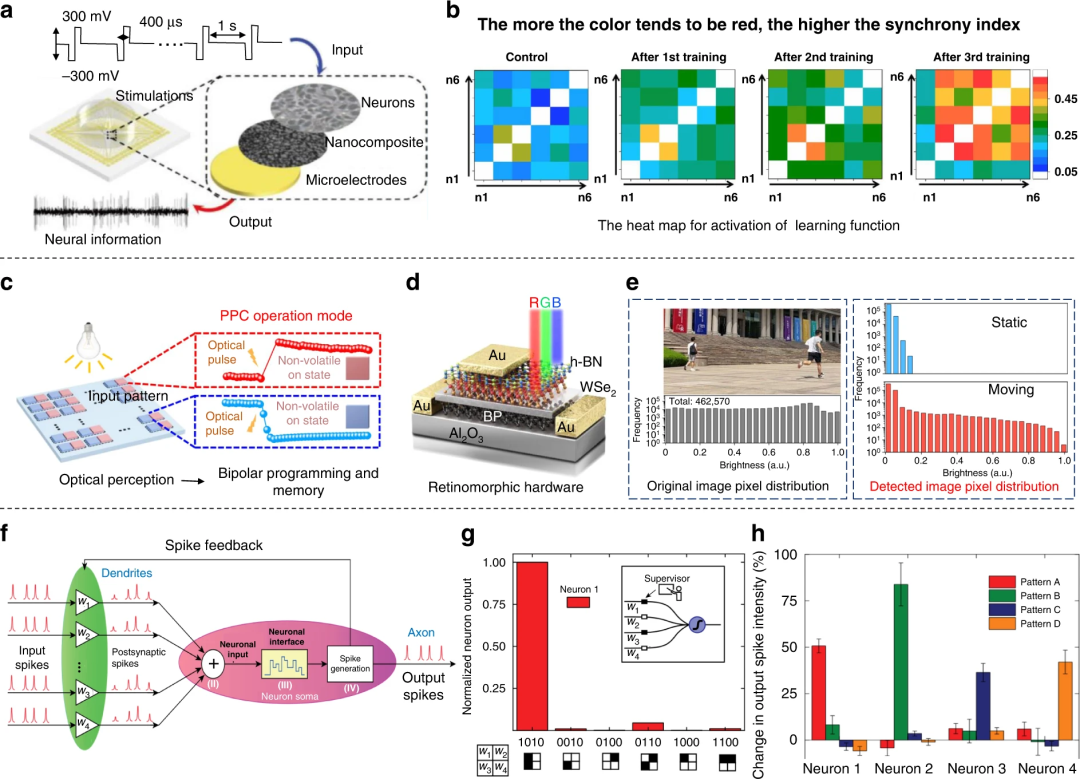
图7:人工智能记忆与识别
图7展示了模拟大脑学习和记忆功能的硬件系统。
图7 a-b.基于MEA的神经网络学习:
a. 使用高通量MEA对海马神经元进行记录和电刺激。
b. 热图显示,随着训练时间的增加,神经元网络的同步性指数上升,表明网络通过电刺激被成功地“训练”,学会了特定的活动模式。
图7 c-e.视网膜启发的运动检测与识别(MDR)硬件:
c-d. 展示了模拟视网膜光感受器和双极细胞功能的二维硬件结构,它集成了光学感知、记忆和识别三个模块。
e. 该硬件能有效区分静止和运动物体:静止物体的像素亮度接近零,而运动物体的像素亮度分布在整个区域。
图7 f-h.光脉冲神经突触网络:
f. 展示了全光学脉冲神经元的工作机制,光脉冲从突触前神经元传入,经过权重处理后形成突触后峰电位。
g. 单个神经元在监督模式下成功学习并识别了“1010”模式。
h. 由四个光子神经元组成的网络,在四种不同训练模式后,表现出不同的峰电位强度变化,表明其成功识别了这四种模式。
这些硬件通过模拟神经元的可塑性和脉冲通信机制,实现了类脑的学习、记忆和识别功能,其运行速度远超生物脑,为处理复杂数据提供了新范式。
HUIYING
总结
神经元设备作为神经科学与工程技术交叉的产物,已在信号记录、神经调控、感官模拟与人工智能识别等方面取得显著进展。未来发展方向包括:
提高灵敏度与时空分辨率:开发更小尺寸、更高性能的电极与传感器。
增强生物相容性:采用纳米材料、二维材料等降低免疫反应。
实现多功能集成:构建闭环监测-刺激系统,用于癫痫、阿尔茨海默病等长期治疗。
融合人工智能:利用神经网络算法提升数据处理与模式识别效率。
尽管在信号质量、组织兼容性和临床转化方面仍面临挑战,但随着材料科学、纳米技术和AI的进一步发展,神经元设备有望在神经疾病治疗、智能假体和类脑计算等领域发挥更大作用。